01
Locomotion Algorithm Validation
보행 알고리즘의 안정성, 속도 변화 대응, 반복 주행 성능을 실내 환경에서 정량적으로 검증할 수 있습니다.
KUT 연구장비는 대학 연구실과 로봇 연구기관을 위한 대형 로봇 보행 시험 플랫폼입니다.
실내 환경에서도 반복 가능한 정량적 보행 실험, 속도 제어, 하네스 연동 시험을 하나의 시스템에서 수행할 수 있습니다.
실제 주행환경을 모두 외부에서 재현하기 어려운 연구조건을 고려하여, 본 시스템은 실내에서도 반복재현 가능한 시험환경을 제공하는데 목적이 있습니다. 보행 안정성 평가, 속도변화 시험, 연속주행 검증, 하네스 보조 실험, 경사 및 정·역회전 조건까지 연구목적에 맞춘 확장형 시험 플랫폼으로 활용할 수 있습니다.
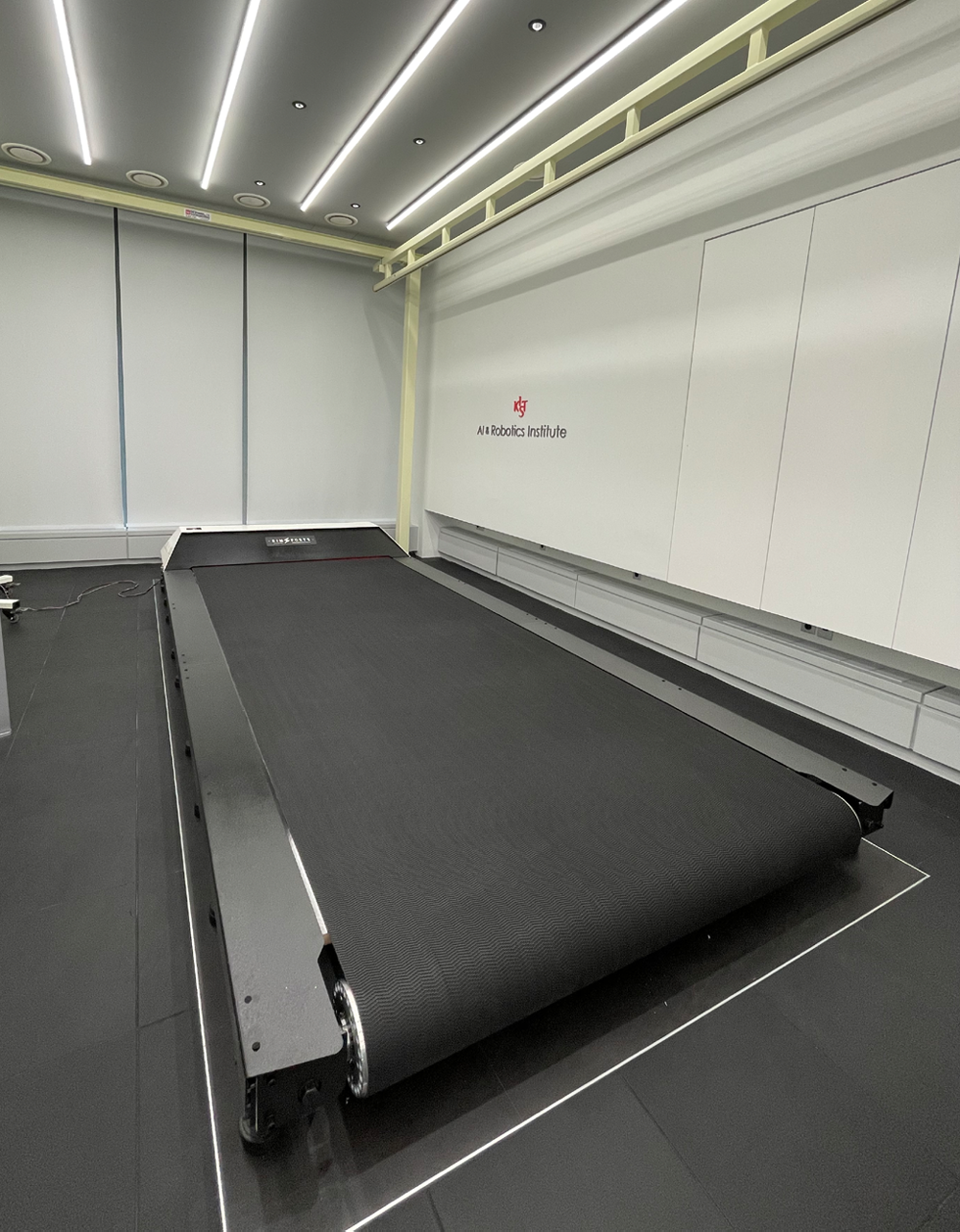
Giant Treadmill Laboratory는 단순한 대형 트레드밀이 아니라, 로봇보행 알고리즘 검증, 기구부 내구성 평가, 주행 안정성 분석을 위한 연구용 시험 인프라를 목표로 설계되었습니다. 특히 고속운전 시 발생할 수 있는 벨트이탈 위험을 줄이기 위한 특허기반 구조, 고하중을 안정적으로 지지하는 프레임 설계, 정밀속도 제어 기술을 바탕으로 대학 및 연구기관이 요구하는 신뢰성 있는 반복실험 환경을 제공합니다.
KIMSPORTS KUT는 외부 환경을 구현한 실내 보행·주행 반복 실험 시스템으로, 가감속·방향 전환 조건에서도 균형 데이터를 확보할 수 있으며 속도 경쟁 시대에 대응하는 특허 기반 고속·고하중 테스트 플랫폼입니다.





Designed for compact robotic locomotion experiments and controlled indoor research environments.



Optimized for variable incline conditions and dynamic motion testing environments.


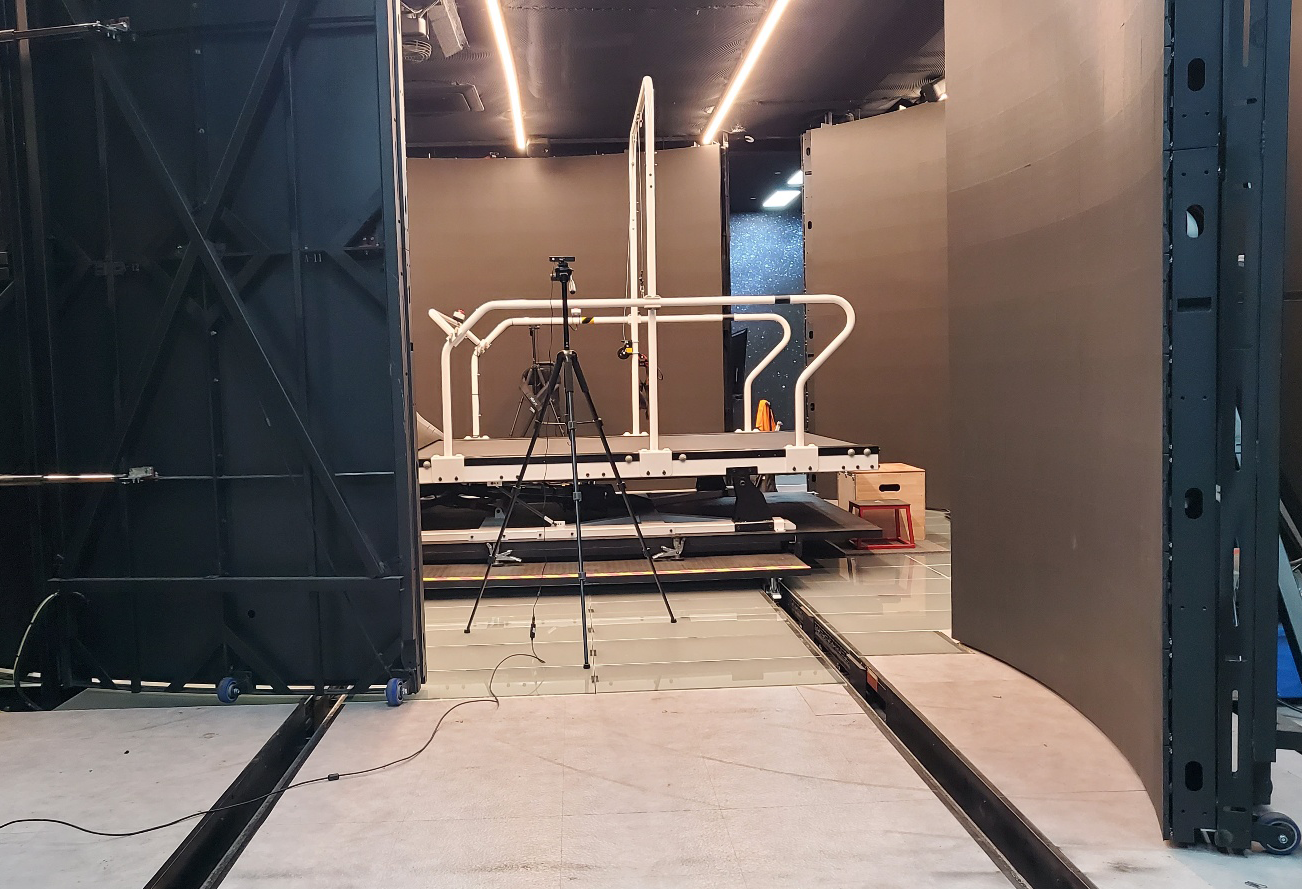
Designed for full-scale humanoid robot testing with extended belt length and stability.



Engineered for heavy payload robotic systems requiring high structural rigidity.
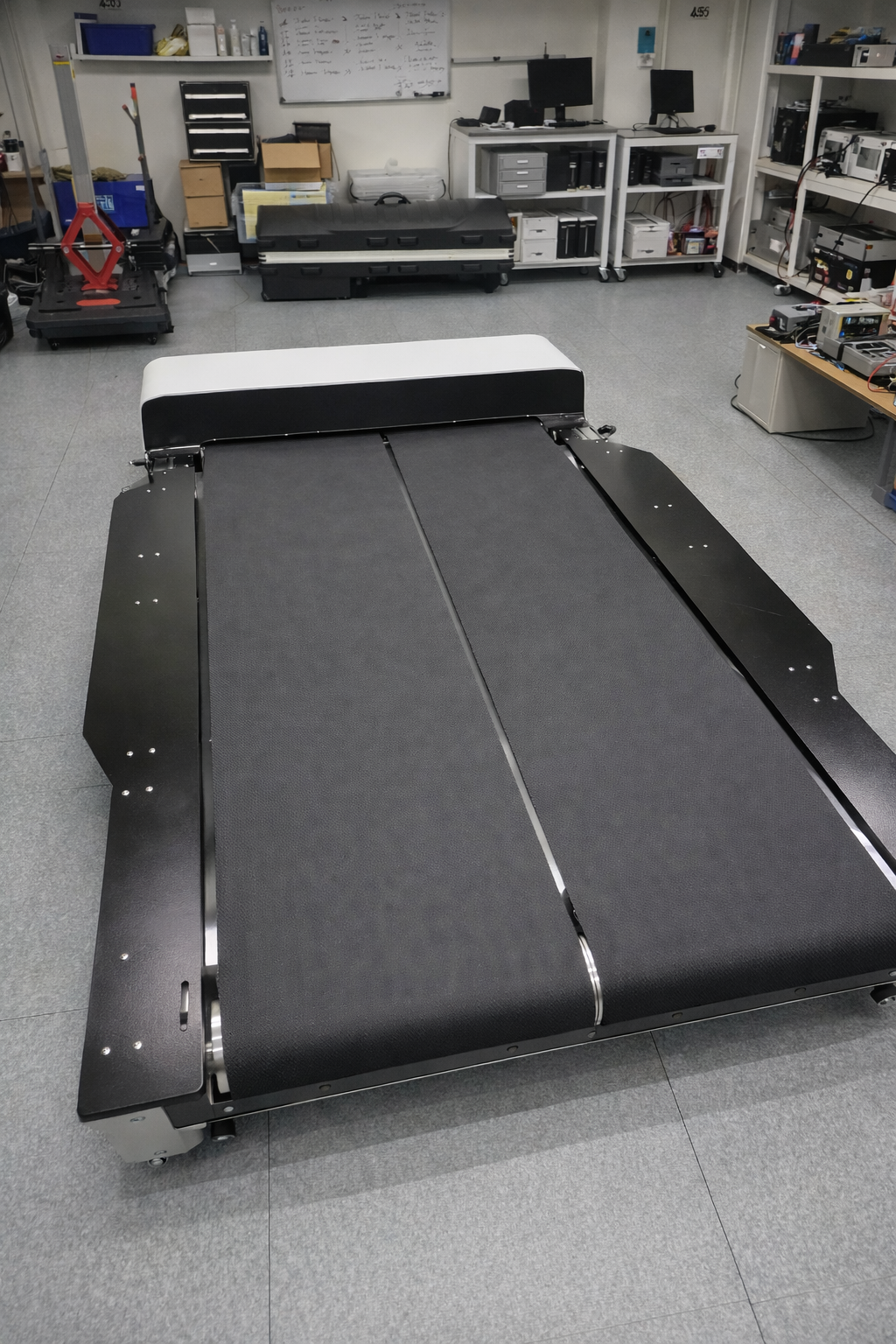

Dual independent belt system for gait imbalance, slip testing, and rehabilitation analysis.
실내 반복 실험 환경에서 로봇의 보행 안정성, 속도 변화 대응, 하네스 연동 조건, 연속 주행 성능을 검증할 수 있도록 설계된 시험 시스템입니다.
대학 연구실, 로봇 연구기관, 산학협력 과제 환경에서 실제 연구 목적에 맞추어 보행 분석, 하드웨어 검증, 주행 알고리즘 평가 등으로 활용할 수 있습니다.
보행 알고리즘의 안정성, 속도 변화 대응, 반복 주행 성능을 실내 환경에서 정량적으로 검증할 수 있습니다.
로봇 기구부의 구조 안정성, 내구성, 고하중 연속 운전 조건에 대한 반복 평가가 가능합니다.
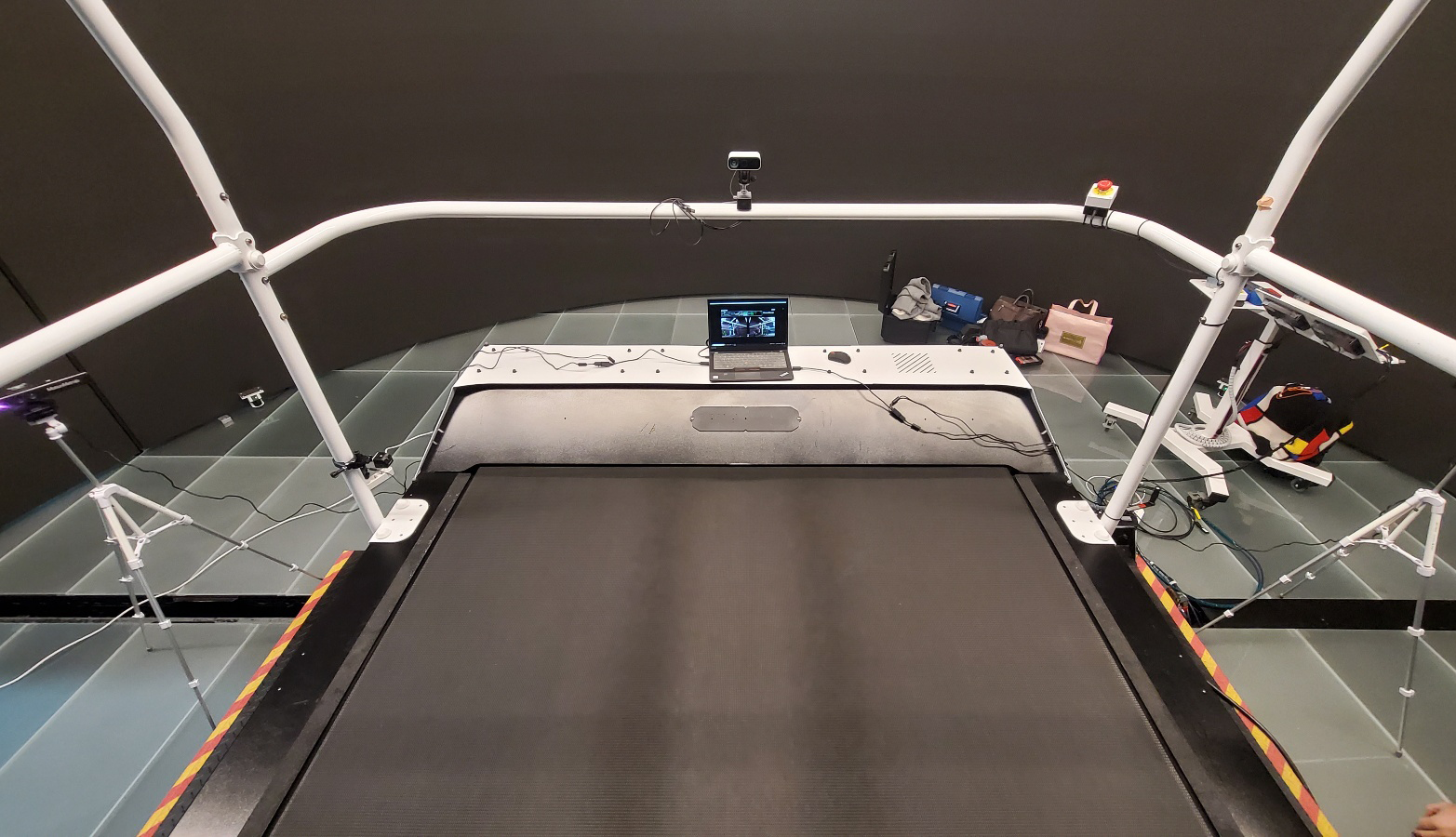
하네스 및 슬라이딩 보조 구조와 연동하여 안전성을 확보한 상태에서 다양한 실험 프로토콜을 구성할 수 있습니다.
고속 주행, 경사 조건, 정·역회전, 센서 계측 연동 등 고도화된 연구 환경으로 확장할 수 있습니다.
연구 목적에 따라 폭, 길이, 속도 조건을 조정할 수 있는 확장형 구조를 기반으로 실험실 환경에 맞춘 시스템 구성이 가능합니다.
KUT 기반 보행 시험 시스템은 대학 연구실 및 로봇 연구기관의
다양한 실험 환경에 맞춰 설계·제작됩니다.
실제 연구 환경에서의 적용 경험을 바탕으로,
반복 가능한 실험 조건과 안정적인 테스트 환경을 제공합니다.
대학 및 연구기관의 로봇 보행 실험을 위해 설계된 특허 기반 대형 주행 시험 시스템
PATENTED STRUCTURAL SAFETY SYSTEM
Designed for robotics laboratories requiring repeatable indoor experiments,
precise speed control, structural safety, and scalable test conditions
for advanced locomotion research.
0.01 km/h 단위의 초정밀 속도 제어가 가능하여, 보행 알고리즘 검증과 주행 조건 변화에 대한 반복 실험의 재현성을 높입니다.
하네스 및 보조 슬라이딩 구조와의 연동이 가능하여, 로봇 전도 위험을 줄이고 보다 안전한 실험 프로토콜 구성이 가능합니다.
고속 시험 환경에서 벨트와 롤러의 이탈 위험을 최소화하기 위한 특허 기반 구조 설계를 적용하여 대형 시험장비의 운전 안정성을 강화합니다.
외부 환경 영향 없이 언제든 반복 가능한 실내 실험 환경을 제공합니다.
대학 연구실, 로봇 연구기관, 산학협력 연구과제, 로봇 제조기업 등 대형 보행 시험 장비 제작 견적은 이메일 또는 카카오 채널로 문의해 주세요.
